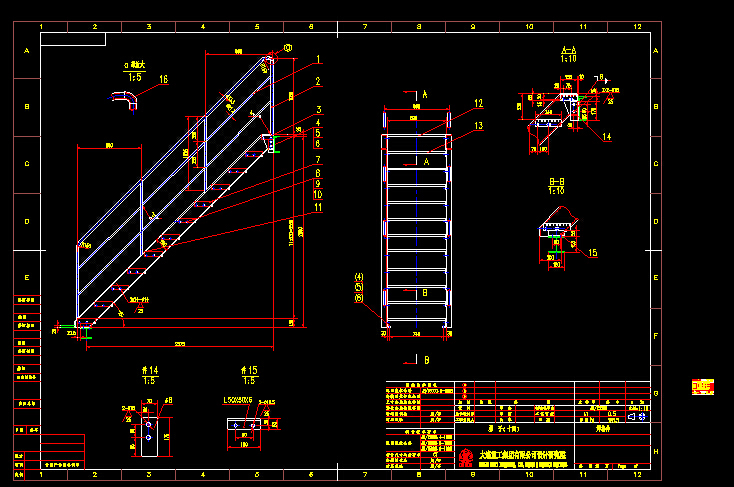
機(jī)械手的設(shè)計
文件介紹:
該文件為 doc 格式(源文件可編輯),下載需要
20 積分
機(jī)械手的設(shè)計
機(jī)械手的設(shè)計_下載(doc格式) 技術(shù)文檔
色综合久久久无码中文字幕 |
国产AV无码专区亚洲AV手机麻豆 |
亚洲人AV在线无码影院观看 |
99久久国产热无码精品免费 |
国产乱人伦无无码视频试看 |
夜夜精品无码一区二区三区 |
亚洲色无码一区二区三区 |
日韩精品久久无码人妻中文字幕 |
亚洲AV无码之国产精品 |
亚洲综合无码AV一区二区
|
中文字幕av无码一二三区电影 |
久久精品无码一区二区三区免费 |
亚洲AV无码国产在丝袜线观看 |
青青爽无码视频在线观看 |
色窝窝无码一区二区三区成人网站
|
无码国产精品一区二区免费式影视 |
一区二区三区无码高清视频 |
亚洲aⅴ无码专区在线观看 |
久久久久亚洲AV无码网站 |
国产乱人伦Av在线无码 |
永久无码精品三区在线4 |
无码熟妇人妻AV影音先锋 |
亚洲精品无码久久久久久久 |
中文无码制服丝袜人妻av |
一本大道无码日韩精品影视_ |
日本精品人妻无码免费大全 |
av无码久久久久久不卡网站 |
少妇人妻偷人精品无码视频新浪 |
成人无码AV一区二区 |
中文字幕av无码专区第一页 |
人妻丰满熟妇aⅴ无码 |
国产亚洲精品无码拍拍拍色欲 |
亚洲不卡无码av中文字幕 |
日韩精品无码久久一区二区三 |
一区二区无码免费视频网站 |
精品多人p群无码 |
亚洲av永久无码精品秋霞电影秋 |
91精品久久久久久无码
|
无码AV中文字幕久久专区 |
亚洲av无码成人黄网站在线观看 |
国产精品三级在线观看无码
|
 豫公網(wǎng)安備 41072402000322號
豫公網(wǎng)安備 41072402000322號

 熱門關(guān)鍵詞:
熱門關(guān)鍵詞: